






In this way a Sercos master, e.g. in combination with the mxAutomation library for CODESYS, can directly communicate with KUKA robots. Thanks to the performance of the communication, the Sercos master can send motion commands very fast to the robot and receive and handle feedback values in real-time. For programming the IEC-61131 languages can be used, special know-how in robot programming languages is not required anymore.
The Sercos/EtherCAT-Bridge acts on both busses as I/O device. The width of the real-time data is flexibly configurable in the range of 32 to 2048 bytes and can be adapted to the needs of various applications. The exchange of real-time data between the two busses is supported by hardware and is executed within one communication cycle. In addition to the application-specific I/O data information also information about communication status and diagnostic data of Sercos or EtherCAT bus is transferred to the respective other side. This allows the two masters to react very fast on changes of the communication state or on error events.
Beside the real-time data channel the device also supports a bidirectional channel for acyclic data exchange. On the Sercos side this mailbox mechanism is represented by IDNs which are readable and writeable over the service channel. From the EtherCAT side the mailboxes are accessible over CoE objects.
The device is carried out as compact module for DIN-rail mounting. For both Sercos and EtherCAT two RJ45 ports are available. A further RJ45 connector at the front side serves as standard Ethernet port. Over this interface devices can communicate with other devices connected to the real-time busses using the respective mechanisms (UC channel and EoE protocol). The IEEE 1588 master/slave also available on this interface can be used for clock synchronization.
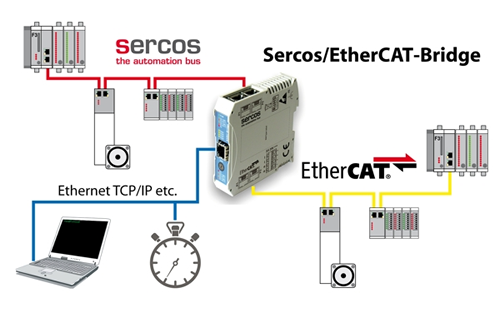
S3EC Sercos/EtherCAT-Bridge connects Sercos and EtherCAT networks

Sercos/EtherCAT-Bridge with KUKA KR C4




















Interested? Submit your enquiry using the form below:
Only available for registered users. Sign In to your account or register here.